|
|
Читаемые статьи
Читаемые книги
Ссылки
|
Главная > Технологические способы металлообработки продольное). Суммирование движений со скоростью Vs равномерной подачи и с постоянной скоростью V дает винтовую пространственную траекторию результирующего движения резания, по которой с равномерной скоростью перемещается каждая точка главной режущей кромки резца. Винтовая траектория лежит на поверхности траектории и в геометрическом отношении является одной из образующих поверхности резания, воспроизведенной одной из точек режущей кромки. Винтовая поверхность резания есть совокупность винтовых траекторий, воспроиз-веде1П1ых всеми точками режущей кромки резца. Определения системы кинематических уиювых геометрических параметров режущей части инструментов формулируются на основе следующих понятий: вектора скорости подачи vs, вектора скорости V, вектора результирующей скорости плоскостей, перпендикулярных векторам i; и Г, траекторий результирующего движения резания, поверхности траектории результирующего движения резания, координагной системы с осями х, у, Z, в которой рассматривается обрабатываемая заготовка и лезвие резца. ОПРЕДЕЛЕНИЯ КИНЕМАТИЧЕСКИХ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ. Значения угловых кинематических параметров рассматривают как результат относительного движения резца и заготовки и в каждой рассматриваемой точке режущей кромки рассчитывают на основе значений параметров, заданных на чертеже, с учетом взаимного расположения векторов скоростей главного и вспомогательного движений, а также связанных с ними плоскостей и поверхностей траекторий. Кинематический главный у I о л в п л а н е фк измеряется между главной режущей кромкой и направлением вектора скорости подачи vs (рис. 5.7). Кинематический вспомога-1ельный у10,л в пл а не фц. 1Л(с/)я-ется между вспомогательной режуи}ей кромкой и 1шправлением вектора скорости подачи Vs (рис. 5.7). Кинематический угол наклона Х измеряется между главной режущей кромкой и плоскостью, перпендикуляр- ной вектору скорости результирующего движения резания v. На рис. 5.8 показан резец, у которого главная режущая кромка 1-2 заточена под углом X = О и при установке резца на суппорте станка расположена на высоте оси вращения заготовки. 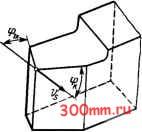 Рис. 5.7. Кинематические углы в плане ф и Ф1к 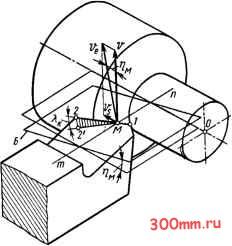 Рис. 5.8. Кинематический угол наклона главной режущей кромки Кинематический угол наклона Х в произвольной точке М главной режущей кромки измеряется между отрезком М-2 и проекцией М-2 этого отрезка на плоскость Б, перпендикулярную вектору скорости результирую1цего движения v, в точке М. Вектор v, и плоскость Б повернуты вокруг горизонтальной линии т - п на угол Цм подъема винтовой траектории результирующего движения в точке М. Так как согласно уравнению (5.5) угол Г) для режущей кромки 1-2 будет иметь наибольшее значение в точке 1, а наименьшее - в точке 2, то и кинематический угол X максимален в точке 1 вершины резца и минимален в точке 2 главной режущей кромки. Кинематический передний угол Ук измеряется между плоскостью, перпендикулярной вектору результирую- 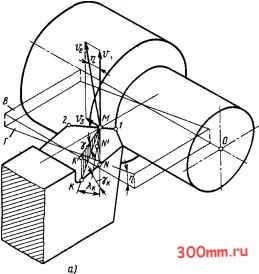 тельной к следу пересечения главной задней поверхности резца поверхностью траектории (в случае винтовой траектории -цилиндром). Кинематический задний угол а в произвольной точке М главной режущей кромки 1-2, лежащей на высоте оси вращения заготов1<и (рис. 5.10), изме- С/гед ппостстиг
  ) Г.пеб плоскости В Рис. 5.9. Кинематический передний угол у щего движения резания v, и передней пО верхностью в направлении сбега по ней срезаемой стружки. В произвольной точке М главной режущей кромки 1-2 резца с X # О (рис. 5.9, а) угол Ук измеряется между линией MN, указывающей направление сбега стружки по передней поверхности, и ее проекцией MN на плоскость Г, перпендикулярную вектору скорости результирующего движения в точке М. Отрезок МК (рис. 5.9, а, б) является линией пересечения передней поверхности и вертикальной плоскости, перпендикулярной проекции главной режущей кромки 1-2 на горизонтальную плоскость В. Поэтому линия МК с плоскостью В образует передний угол у. Линия сбега стружки MN отклоняется от линии МК на угол, численно равный кинематическому углу Х в рассматриваемой точке М главной режущей кромки. Кинематический задний угол а, измеряется между линией, на которой лежит вектор скорости результирующего движения резания v, и каса- ряется между касательной к линии пересечения М-М) задней плоскости резца цилиндром диаметром D и линией, на которой лежит вектор скорости t;, результирующего движения резания. Он наклонен к вектору скорости v под углом г) подъема винтовой траектории результирующего движения. При этом кинематический задний угол к = а - Г), где а ~ задний угол, заданный чертежом. § 5.3. РАСЧЕТ КИНЕМАТИЧЕСКИХ УЗЛОВ Так как кинематические углы супдест-вуют только в процессе резания, ю их значения можно рассчитать, исходя из сформулированных выше определений и заданных на чертежах статических yi .юв. КИНЕМАТИЧЕСКИЙ УГОЛ НАКЛОНА ГЛАВНОЙ РЕЖУЩЕЙ КРОМКИ. Рассмотрим токарный резец в системе координат с осями х, у, г (рис. 5.11). Геометрическая ось корпуса резца парал- лельна оси у, а вершина 1 установлена на высоте оси Ох вращения заготовки. На режущей части резца при заточке выполнен угол К наклона главной режущей кромки и главный угол в плане ф. В произвольной точке Ml главной режущей кромки вектор скорости результирующего дви- 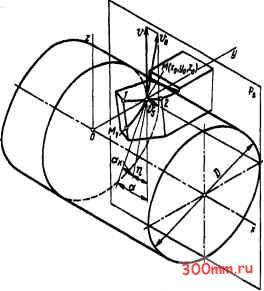 точка Ml лежит вьпне горизонтальной плоскости хОу. В связи с этим плоскость, касательная к поверхности траектории, образует с перпендикуляром к горизонтальной плоскости хОу угол е. Линия, на которой лежит вектор (на рис. 5.11 отрезок М1М2), образует с вертикальной 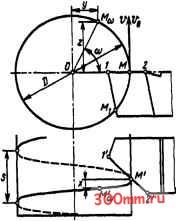 Рис. 5.19. Кинематический мдний угол 01к 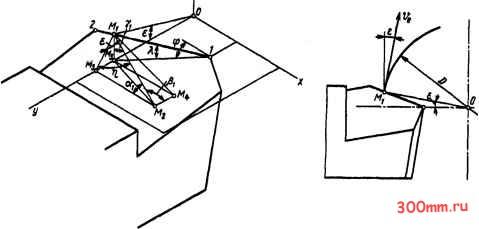 Рис. 5.11. Схема определения направляющих косинусов пи ии, но которой лежит вектор скорости v, реаультирующего движения реюния жения резания лежит в плоскости, касательной к цилиндрической поверхности траектории диаметром D. При угле наклона главной режущей кромки Х>0 плоскостью yOz угол ц подъема винтовой траектории, значение которого находят по уравнению (5.5). Так как точка Afi расположена выше горизонтальной плоскости
|
 Чем хороши многотопливные котлы?  Нетрадиционное отопление  Детище отечественной Оборонки  Что такое автономное индивидуальное отопление?  Использование тепловых насосов  Эффективное теплоснабжение для больших помещений  Когда удобно применять теплые полы |
|||||||||||||||||||
|
© 1998 - 2026 www.300mm.ru.
При копировании материала обязательно наличие обратных ссылок. |


