|
|
Читаемые статьи
Читаемые книги
Ссылки
|
Главная > Насосы, вентиляторы и компрессоры крытиями дросселя Д, должно быть не менее 15 (для полл чения надежных форм характеристик). Измерительная аппаратура и методика обработки ре. зультатов измерений при испытаниях в условиях эксплуа-тации должны обеспечивать относительную погрешность при измерении подачи не более 3,2, напора - 2, тастоты вращения - 1 %. Подача насосов измеряется приборами, устанавливаемыми на напорном трубопроводе. При испытании иасосов на воде подача измеряется сужающим устройством (соплом, диафрагмой) или измерением скоростей в мерном се- чении (точечный способ с последующим суммированием). Сужающее устройство, например диафрагма, обусловливает местное падение напора ha=lc/(2g). Присоединив сюда уравнение расхода Q = cn(P/4, получим Q = mVf. (3.99) где т = УпЧдЩ. Коэффициент I местного сопротивления диафрагмы определяется по справочникам в зависимости от конструкции диафрагмы и отношения диаметров ее и напорного водопровода насоса. Следовательно, коэффициент т может быть вычислен, и формула (3.99) удобна для расчета расхода. Потеря напора Лд в диафрагме при пользовании формулой (3.99) выражается в метрах столба той жидкостч, расход которой измеряется. Так, если показание ртутного дифманометра диафрагмы - Л, то /1д=Лррт/р, где ррт - плотность ртути; р - плотность жидкости, подаваемой насосом. При испытаниях насосов в лабораторных условиях подачу можно измерять водосливным устройством или мерными баками. Статическое давление, развиваемое машиной, измеряют как разность абсолютных статических давлений (рз- ~Pi) в напорном и всасывающем трубопроводах. Пр? этом HcT={p2-Pi)/pg- Для этой цели применяют манометры класса точности не ниже 0,6 для напорного и не ниже 1,0 для всасывающего трубопровода. Манометр и вакуумметр удобно располагать на одной высоте, как это показано на рис. 3.40. В этом случае нет необходимости учитывать разность геометрических отметок приборов, ecjjn импульсные трубки их заполнены жидкостью, подаваемой насосом. При измерениях давлений следует особое внимание обращать на правильное расположение мест отбора давления, рися в виду, что всякое изменение направления движения потока, а также изменение размеров сечения вызывает появление инерционных сил, влияющих на давление в месте р -положения импульсного отверстия. Во всех случаях из-ц НИИ давлений желательно использовать несколько им-п сных отверстий, объединенных общей (осредняющей) к ерой. Если определены абсолютные давления pi и рг во всасывающем и напорном трубопроводах насоса, то полный напор, развиваемый насосом, при расположении приборов на одной высоте, будет равен Pg 2g где Ci и С2 - средние скорости, вычисляемые по подаче и площадям сечений всасывающего и напорного трубопроводов. Точки, соответствующие измеренным при разных режимах Q и Н, наносят в график и, соединяя их плавной кривой, получают энергетическую напорную характеристику. Мощность насоса определяют или измерением крутящего момента М на валу и частоты вращения п, или непосредственным измерением мощности, передаваемой двига-те ем. Измерение М можно проводить несколькими способами. В абораторных условиях удобно применять балансирный эл ктродвигатель; в этом случае статор электродвигателя помвешен на подшипниках качения, геометрические оси которых совпадают с осью ротора электродвигателя. Крутящий момент, развиваемый электродвигателем, передается Через муфту на вал приводимой машины; он получается как результат силового взаимодействия между обмотками статора и ротора электродвигателя. Поэтому момент, вращающий вал машины, равен моменту, стремящемуся повернуть статор электродвигателя относительно его оси; последний измеряется подвешиванием уравновешивающего груза к рычагу, радиально прикрепленному к статору электродвигателя. Если масса груза, подвешенного к рычагу, равна т, кг, а горизонтальное расстояние точки подвеса его от оси машины равно /, м, то момент, Дж, передаваемый электродвигателем на вал машины, равен M = mgL Иногда для измерения М применяют установку электродвигателя на качающейся платформе. Этот способ аналоги- чен описанному с балансирным двигателем. при измерении момента балансирным электродвигате-лем или двигателем на качающейся платформе долзкн{ учитываться вентиляционный и механический моменты двигателя, определяемые при работе двигателя без на-грузки. Другой способ измерения крутящего момента заключа-ется в применении торсионного (крутильного) динамомет-ра. При этом между валами электродвигателя и приводи, мой машины устанавливают упругий валик, сделанный из стали, с высоким пределом пропорциональности. Момент, передаваемый таким валиком, пропорционален углу закру! чивания его; поэтому достаточно измерить угол закручивания при вращении валика посредством стробоскопического устройства и по нему определить момент на валу машины. Частоту вращения вала машины измеряют тахометром или счетчиком. По измеренному крутящему моменту на валу машины и частоте вращения легко определить мощность, кВт: N -- или Л = --- . 1000 1000 где {о=лп/30 1/с. В производственных условиях наиболее доступным является способ определения мощности на валу по электрической мощности на зажимах приводного электродвигателя. Применяя точные электрические приборы, измеряют электрическую мощность Лэл на зажимах электродвигателя и по зависимости между мощностью на зажимах и КПД предварительно испытанного электродвигателя определяют мощность двигателя Лдв, которая при соединении муфтой равна мощности на валу машины: Лдв=т]двЛэл=Л- При испытании насоса его КПД определяют как частное от деления полезной мощности на мощность насоса: Т1 = NJN = pQgH/lOOON. Нанесением на график соответственных значений Q, N и Q, г\, измеренных для различных режимов, получаем характеристики A==f(Q) и Т1=ф(0. ровные параметры машины Н, р, N и г] изменяются. Однако сеть трубопроводов и потребители накладывают на некоторые из параметров определенные условия. Так, например! насосы и вентиляторы, покрывая заданный график расходов, должны создавать переменное давление, определяемое . потребителем и гидравлическими свойствами си-схемы трубопроводов. Компрессоры в некоторых случаях работают на сеть с пе- -> рис. 3.41. Центробежный насос в систе-I е трубопроводов Рис. 3.42. График дроссельного регули- рованм центробежной машины 3.16. Регулирование псдачи Основной задачей регулирования машины является по* дача в сеть расхода Q, м/с, заданного определенным графиком. При этом, как показывают характеристики, все ос-  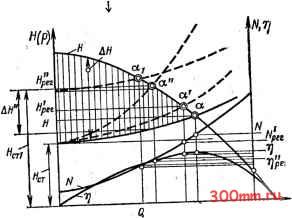 ,арег ИрегО ременным Q, но должны обеспечить постоянное давление р (пневматический инструмент, воздушные молоты); в других случаях они работают с постоянным Q при переменном Р (доменный и ваграночный процессы и т.п.). Таким образом, возможны различные варианты задачи регулирования подачи. Дроссельное регулирование при п = const. Пусть центробежная машина включена в трубопроводную систему так, как показано на рис. 3.41. Представим на графике (рис. 3.42) характеристики напора, мощности и КПД центробежной машины при постоянной частоте вращения. На этом же графике нанесем ха- рактеристику трубопроводной сети, на которую включена машина: при этом будем предполагать, что регулирующие дроссель открыт полностью. Установившийся режим работы машины возможен только при условии, что напор машины равен напору, рас-ходуемому в системе. Так как первый из них выражается ординатами характеристики H=f{Q) центробежной ма-шины, а второй - ординатами характеристики трубопровода, то очевидно, что указанное равенство наблюдается Только в точке а пересечения характеристик. Таким обра-зом, точка а определяет режим работы установки, т. е. подачу, напор, мощность и КПД машины, при полностью от-Крытом дросселе. Эти величины на рис. 3.42 обозначены соответственно Q, Я, Л, т]. В случае прикрытия дросселя на напорной трубе положение характеристики трубопровода изменится и точка а передвинется по характеристике машины влево вверх и займет положение а, определив тем самым новые значения параметров Qp,;, я; лг; Ti;. Дальнейшее прикрывание дросселя вызывает смещение характеристики трубопроводной системы еще больше вверх, й Точка а передвинется, например, в точку а , дающую новые значения Qp, Я; , N, т] и т. д. Следовательно, дроссельное регулирование при n=s =const достигается введением дополнительного гидравлического сопротивления в сеть трубопроводов машины. Поскольку наибольшая подача достигается при полностью открытом дросселе (точка а), дроссельное регулирование применяют только с целью уменьшения подачи. Из рис. 3.42 видно, что дросселирование уменьшает мощность на валу машины и вместе с тем повышает долю энергии, расходуемой при регулировании; поэтому оно неэкономично. Так, например, прн регулировании до напор, непроизводительно затрачиваемый в дросселе, определяется отрезком АН ординаты, а теряемая при этом в насосе мощность будет ЮООт] Чем более глубоко осуществляется процесс регулирования, тем более непроизводительна затрата мощности. Энергетическая эффективность этого вида регулирования центробежных машин низка, однако ввиду чрезвычайной простоты этот способ имеет широкое применение. При дроссельном регулировании центробежных насосов, подающих жидкость, дроссель располагают на напорной трубе. Если разместить его на всасывающей трубе, то при регулировании могут возникнуть кавитационные явления в потоке и нарушение нормальной работы насоса. Подача центробежной машины при постоянной частоте рращения может изменяться не только вследствие изменения открытия дросселя, но и по причинам, связанным с изменением давления в системе трубопроводов. Представим себе, что по какой-либо причине повышается давление Р2 в напорном баке. На рис. 3.42 это отразится в смещениях характеристик трубопровода вверх на одинаковые отрезки при всех подачах; при этом точка а пересечения характеристик будет передвигаться по характеристике машины в.1ево и вверх; это означает, что подача машины уменьша-ечся. Уменьшение давления Рг, наоборот, вызывает увеличение подачи машины. Аналогично влияет на подачу машины изменение геометрической высоты. В некоторых случаях режим работы центробежной машины может изменяться самопроизвольно (без прямого вмешательства эксплуатационного персонала). Так, например, если в установке, включенной по схеме на рис. 3.41, прекратился расход жидкости из напорного бака, а центробежная машина продолжает работать, то статическая высота подачи будет возрастать ввиду изменения рз и Яг; это повлечет за собой смещение характеристики трубопровода вверх. Точка а будет передвигаться по характеристике машины влево вверх, подача машины будет уменьшаться при одновременном возрастании напора и снижении мощности. Такой процесс может привести к понижению подачи машины до нуля; это произойдет в тот момент, когда статическая высота подачи (сумма геометрической высоты и высоты давления) сравняется с напором холостого хода машины. В заключение отметим, что дросселирование как способ регулирования допустимо только в тех случаях, когда потребляемая мощность уменьшается с уменьшением подачи > OJ. Если же потребляемая мощность возрастает С уменьшением подач то дросселирование как Способ регулирования бессмысленно, поскольку вызывает Увеличение потребляемой мощности. Регулирование изменением частоты вращения вала ма- иины. в тех случаях, когда имеется возможность изменять
|
 Чем хороши многотопливные котлы?  Нетрадиционное отопление  Детище отечественной Оборонки  Что такое автономное индивидуальное отопление?  Использование тепловых насосов  Эффективное теплоснабжение для больших помещений  Когда удобно применять теплые полы |
|
© 1998 - 2026 www.300mm.ru.
При копировании материала обязательно наличие обратных ссылок. |


